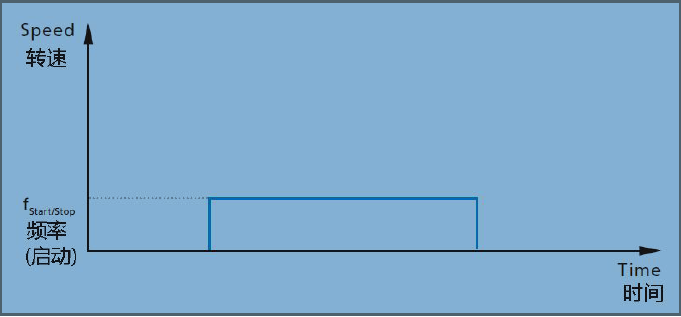
①موشن پروفائل کی قسم پر منحصر ہے، تجزیہ مختلف ہوتا ہے۔ اسٹارٹ-اسٹاپ آپریشن: اس آپریشن موڈ میں، موٹر کو بوجھ سے جوڑ دیا جاتا ہے اور وہ مستقل رفتار سے چلتی ہے۔ موٹر کو کمانڈ فریکوئنسی کے پہلے مرحلے کے اندر بوجھ کو تیز کرنا ہوتا ہے (جڑتا اور رگڑ پر قابو پانا)۔
ناکامی موڈ:سٹیپر موٹرشروع نہیں ہوتا
| وجوہات | حل |
| لوڈ بہت زیادہ ہے۔ | غلط موٹر، ایک بڑی موٹر منتخب کریں |
| تعدد بہت زیادہ ہے۔ | تعدد کو کم کریں۔ |
| اگر موٹر بائیں سے دائیں طرف گھومتی ہے تو، ایک مرحلہ ٹوٹ سکتا ہے یا منسلک نہیں ہوسکتا ہے۔ | موٹر کو تبدیل یا مرمت کریں۔ |
| فیز کرنٹ مناسب نہیں ہے۔ | فیز کرنٹ میں اضافہ کریں، کم از کم پہلے کے دوران چند قدم |
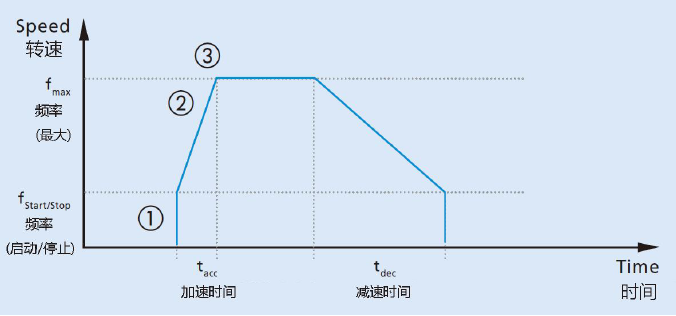
②سرعت موڈ: اس صورت میں،سٹیپر موٹرڈرائیور میں پہلے سے طے شدہ ایکسلریشن ریٹ کے ساتھ زیادہ سے زیادہ فریکوئنسی کو تیز کرنے کی اجازت ہے۔
ناکامی موڈ: سٹیپر موٹر شروع نہیں ہوتی ہے۔
وجوہات اورحل① سیکشن "اسٹارٹ اسٹاپ آپریشن" دیکھیں۔
ناکامی موڈ: سٹیپر موٹر ایکسلریشن ریمپ کو ختم نہیں کرتی ہے۔
| وجوہات | حل |
| گونج فریکوئنسی میں پھنسے ہوئے موٹر | ● گونج سے گزرنے کے لیے سرعت بڑھائیں۔تعدد جلدی● گونج کے نقطہ کے اوپر اسٹارٹ اسٹاپ فریکوئنسی کو منتخب کریں۔ہاف سٹیپنگ یا مائیکرو سٹیپنگ استعمال کریں۔●ایک مکینیکل ڈیمپر شامل کریں جو ایک کی شکل اختیار کر سکتا ہے۔پیچھے شافٹ پر inertial ڈسک |
| غلط سپلائی وولٹیج یا موجودہ ترتیب (بہت کم) | ● وولٹیج یا کرنٹ میں اضافہ کریں (اسے زیادہ قدر سیٹ کرنے کی اجازت ہے۔مختصر مدت کے لیے)● کم مائبادا موٹر کی جانچ کریں۔●مستقل کرنٹ ڈرائیو استعمال کریں (اگر مستقل وولٹیج ڈرائیو استعمال کی جائے) |
| اوپر کی رفتار بہت زیادہ ہے۔ | ● اوپر کی رفتار کو کم کریں۔ایکسلریشن ریمپ کو کم کریں۔ |
| سے ایکسلریشن ریمپ کا خراب معیارالیکٹرانکس (ڈیجیٹل ریمپ کے ساتھ ہوتا ہے) | ● دوسرے ڈرائیور کے ساتھ کوشش کریں۔ |
فیلور موڈ: سٹیپر موٹر ایکسلریشن کو ختم کر دیتی ہے لیکن مستقل رفتار تک پہنچنے پر رک جاتی ہے۔
| وجوہات | حل |
| سٹیپر موٹر اپنی حد پر کام کر رہی ہے۔ بہت زیادہ سرعت کی وجہ سے قابلیت اور اسٹال۔ توازن کی پوزیشن ختم ہو گئی ہے، روٹر کمپن اور عدم استحکام کا سبب بنتا ہے. | ● ایک چھوٹی ایکسلریشن ریٹ منتخب کریں یا دو مختلف استعمال کریں۔سرعت کی سطح، شروع میں زیادہ، اوپر کی رفتار کی طرف کم● ٹارک میں اضافہ کریں۔● عقبی شافٹ پر مکینیکل ڈیمپر شامل کریں۔ نوٹ کریں کہاس سے روٹر کی جڑت بڑھ جائے گی اور ممکن ہے مسئلہ حل نہ ہو۔اگر اوپر کی رفتار موٹر کی حد پر ہے۔ ● مائیکرو سٹیپنگ کا استعمال کرتے ہوئے موٹر چلائیں۔ |
③ وقت کے ساتھ تنخواہ کے بوجھ میں اضافہ
کچھ معاملات میں، موٹر عام طور پر طویل عرصے تک چلتی ہے لیکن کچھ وقت کے بعد قدم کھو دیتی ہے۔ اس صورت میں، اس بات کا امکان ہے کہ موٹر کی طرف سے دیکھا جانے والا بوجھ بدل گیا ہو۔ یہ موٹر بیرنگ کے پہننے سے یا کسی بیرونی تقریب سے آ سکتا ہے۔
حل:
● کسی بیرونی واقعہ کی موجودگی کی تصدیق کریں: کیا موٹر سے چلنے والا طریقہ کار بدل گیا ہے؟
● بیئرنگ پہننے کی تصدیق کریں: موٹر لائف ٹائم کے لیے سینٹرڈ آستین والے بیئرنگ کے بجائے بال بیرنگ استعمال کریں۔
● تصدیق کریں کہ آیا محیطی درجہ حرارت بدل گیا ہے۔ بیئرنگ چکنا کرنے والے واسکاسیٹی پر اس کا اثر مائیکرو موٹرز کے لیے معمولی نہیں ہے۔ آپریٹنگ رینج کے لیے موزوں چکنا کرنے والے مادے استعمال کریں۔ (مثال: چکنا کرنے والا انتہائی درجہ حرارت پر، یا طویل استعمال کے بعد چپچپا ہو سکتا ہے، جس سے تنخواہ کا بوجھ بڑھ جائے گا)
پوسٹ ٹائم: نومبر-16-2022