




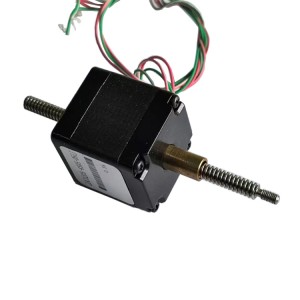
NEMA34 86mm لکیری ہائبرڈ سٹیپر موٹر ایکسٹرنل ڈرائیو ہائی تھرسٹ
تفصیل
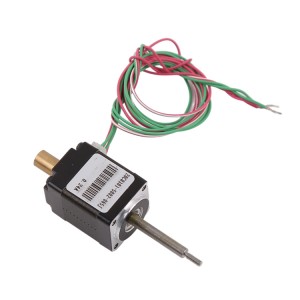
NEMA 34 ہائبرڈ سٹیپر موٹر کا سائز 86mm ہے۔
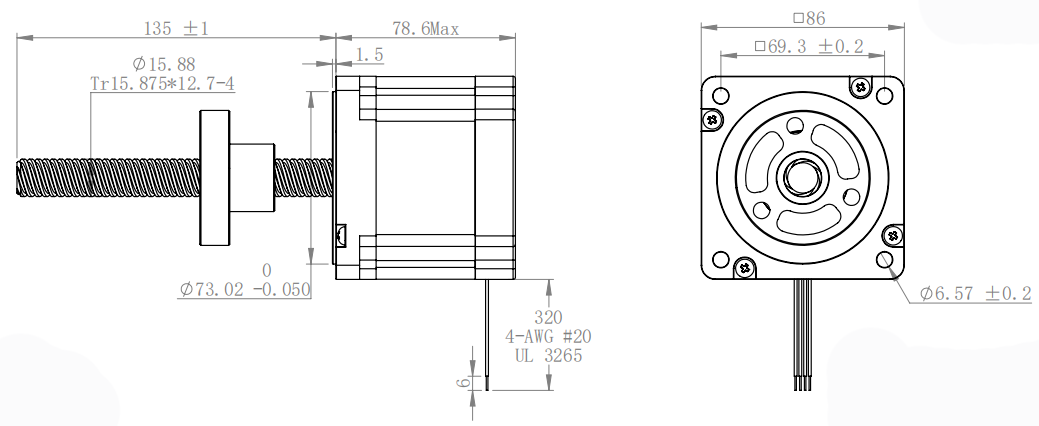
یہ ایکسٹرنل ڈرائیو لکیری سٹیپر موٹر بھی ہے جس کے اوپر 135 ملی میٹر کی لمبائی لیڈ سکرو شافٹ ہے، اس کے ساتھ پلاسٹک نٹ/سلائیڈ بھی فٹ ہے۔
لیڈ سکرو ماڈل نمبر ہے: Tr15.875*P3.175*4N
لیڈ اسکرو کی پچ 3.17 ملی میٹر ہے، اور اس میں 4 اسٹارٹس ہیں، لہذا لیڈ = اسٹارٹ نمبر* لیڈ اسکرو پچ = 4 * 3.175 ملی میٹر = 12.7 ملی میٹر
تو موٹر کے قدم کی لمبائی ہے: 12.7mm/200steps=0.0635mm/step
ہمارے پاس اختیارات کے لیے لیڈ اسکرو کی دوسری قسم بھی ہے، یہ موٹر کے زور اور لکیری رفتار پر گاہک کی ضرورت پر منحصر ہے۔

پیرامیٹرز
| ماڈل نمبر | SM86C0905 |
| موٹر قطر | 86 ملی میٹر (NEMA34) |
| ڈرائیو وولٹیج | 5وی ڈی سی |
| کنڈلی مزاحمت | 1.6Ω±10%/مرحلہ |
| مرحلے کی تعداد | 2 مراحل(دو قطبی) |
| مرحلہ زاویہ | 1.8°/قدم |
| موجودہ کی شرح کریں۔ | 3.12A/مرحلہ |
| کم از کم زور (300 پی پی ایس) | 50 کلو گرام |
| قدم کی لمبائی | 0.0635 ملی میٹر فی قدم |
لیڈ سکرو پیرامیٹر
| لیڈ سکرو کی قسم | Trapezoidal سکرو |
| لیڈ سکرو ماڈل نمبر | Tr15.875*P3.175*4N |
| بیرونی قطر | 15..875 ملی میٹر |
| لیڈ | 12.7 ملی میٹر |
| شروع ہوتا ہے۔ | 4 |
| پچ | 3.175 ملی میٹر |
| قدم کی لمبائی | 0.0635 ملی میٹر فی قدم |
ڈیزائن ڈرائنگ
لیڈ سکرو کے بارے میں
لکیری ہائبرڈ سٹیپر موٹر پر استعمال ہونے والا لیڈ اسکرو عام طور پر ٹراپیزائیڈل لیڈ اسکرو ہے۔
مثال کے طور پر Tr3.5*P0.3*1N لیڈ سکرو۔
Tr کا مطلب ہے trapezoidal لیڈ سکرو کی قسم
P0.3 کا مطلب ہے کہ لیڈ سکرو کی پچ 0.3 ملی میٹر ہے۔
1N کا مطلب ہے کہ یہ سنگل اسٹارٹ لیڈ سکرو ہے۔
لیڈ سکرو لیڈ = اسٹارٹ نمبر * پچ
تو اس مخصوص لیڈ سکرو کے لیے، یہ 0.3 ملی میٹر لیڈ ہے۔
ہائبرڈ سٹیپر موٹر کا سٹیپر اینگل 1.8 ڈگری فی سٹیپ ہے، جو ایک موڑ کو گھمانے میں 200 قدم لیتا ہے۔
قدم کی لمبائی لکیری حرکت ہوتی ہے جب موٹر ایک قدم اٹھاتی ہے۔
0.3mm لیڈ سکرو کے لیے، قدم کی لمبائی 0.3mm/200 step=0.0015mm/step ہے
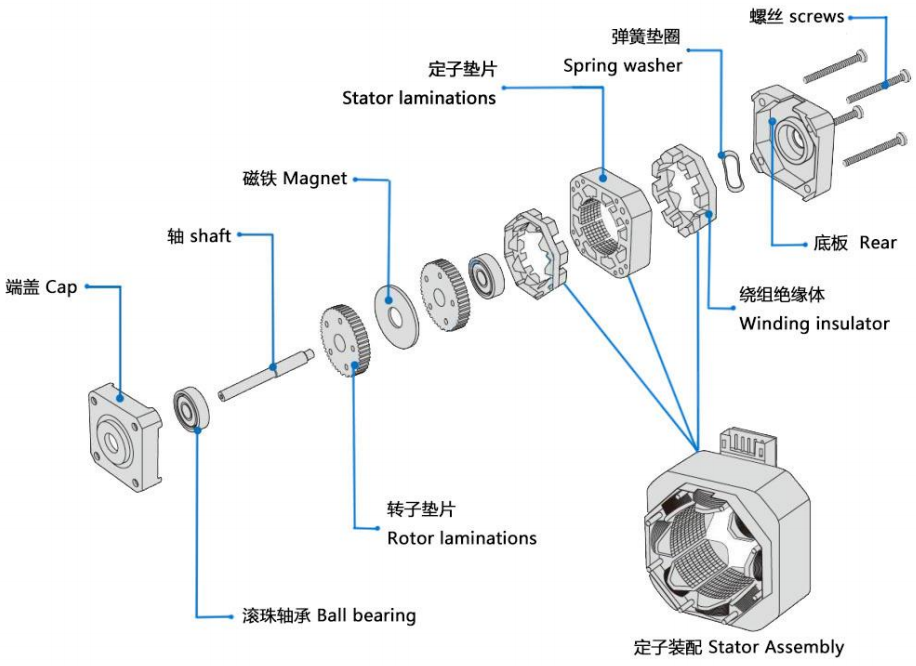
NEMA سٹیپر موٹرز کا بنیادی ڈھانچہ
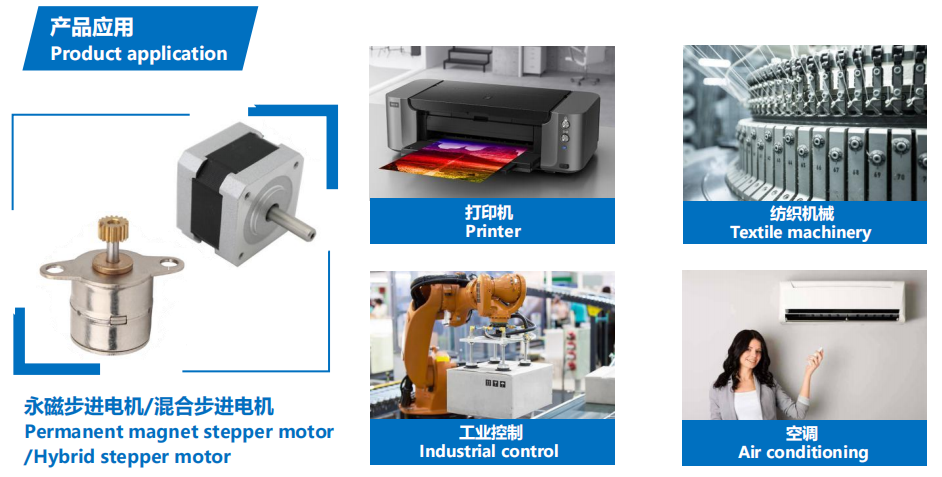
ہائبرڈ سٹیپر موٹر کی درخواست
ہائبرڈ سٹیپر موٹرز (200 یا 400 قدم فی انقلاب) کے اعلی ریزولوشن کی وجہ سے، وہ بڑے پیمانے پر ایسی ایپلی کیشنز کے لیے استعمال ہوتے ہیں جن کو اعلی درستگی کی ضرورت ہوتی ہے، جیسے:
تھری ڈی پرنٹنگ
صنعتی کنٹرول (CNC، خودکار ملنگ مشین، ٹیکسٹائل مشینری)
کمپیوٹر کے پیری فیرلز
پیکنگ مشین
اور دوسرے خودکار نظاموں کو اعلی صحت سے متعلق کنٹرول کی ضرورت ہوتی ہے۔
صارفین کو "پہلے سٹیپر موٹرز کا انتخاب کریں، پھر موجودہ سٹیپر موٹر کی بنیاد پر ڈرائیور کا انتخاب کریں" کے اصول پر عمل کرنا چاہیے۔
ہائبرڈ سٹیپنگ موٹر چلانے کے لیے فل سٹیپ ڈرائیونگ موڈ کا استعمال نہ کرنا بہتر ہے، اور فل سٹیپ ڈرائیونگ کے تحت کمپن زیادہ ہوتی ہے۔
ہائبرڈ سٹیپر موٹر کم رفتار کے مواقع کے لیے زیادہ موزوں ہے۔ ہم تجویز کرتے ہیں کہ رفتار 1000 rpm (0.9 ڈگری پر 6666PPS) سے زیادہ نہ ہو، ترجیحاً 1000-3000PPS (0.9 ڈگری) کے درمیان، اور اس کی رفتار کو کم کرنے کے لیے اسے گیئر باکس کے ساتھ منسلک کیا جا سکتا ہے۔ موٹر میں کام کرنے کی اعلی کارکردگی اور مناسب تعدد پر کم شور ہے۔
تاریخی وجوہات کی بناء پر، برائے نام 12V وولٹیج والی صرف موٹر ہی 12V استعمال کرتی ہے۔ ڈیزائن ڈرائنگ پر دیگر ریٹیڈ وولٹیج موٹر کے لیے بالکل مناسب ڈرائیونگ وولٹیج نہیں ہے۔ صارفین کو اپنی ضرورت کے مطابق مناسب ڈرائیونگ وولٹیج اور موزوں ڈرائیور کا انتخاب کرنا چاہیے۔
جب موٹر تیز رفتار یا بڑے بوجھ کے ساتھ استعمال ہوتی ہے، تو یہ عام طور پر کام کرنے کی رفتار سے براہ راست شروع نہیں ہوتی ہے۔ ہم بتدریج تعدد اور رفتار بڑھانے کا مشورہ دیتے ہیں۔ دو وجوہات کی بناء پر: پہلی، موٹر قدم نہیں کھوتی، اور دوسرا، یہ شور کو کم کر سکتی ہے اور پوزیشننگ کی درستگی کو بہتر بنا سکتی ہے۔
موٹر کو کمپن ایریا (600 پی پی ایس سے نیچے) میں کام نہیں کرنا چاہیے۔ اگر اسے سست رفتار سے استعمال کرنا ضروری ہے تو، وولٹیج، کرنٹ کو تبدیل کرکے یا کچھ ڈیمپنگ شامل کرکے کمپن کا مسئلہ کم کیا جاسکتا ہے۔
جب موٹر 600PPS (0.9 ڈگری) سے نیچے کام کرتی ہے، تو اسے چھوٹے کرنٹ، بڑے انڈکٹنس اور کم وولٹیج سے چلنا چاہیے۔
جڑتا کے ایک بڑے لمحے کے ساتھ بوجھ کے لیے، ایک بڑے سائز کی موٹر کا انتخاب کیا جانا چاہیے۔
جب زیادہ درستگی کی ضرورت ہو، تو اسے گیئر باکس شامل کرکے، موٹر کی رفتار بڑھا کر، یا ذیلی تقسیم ڈرائیونگ کا استعمال کرکے حل کیا جاسکتا ہے۔ نیز 5 فیز موٹر (یونی پولر موٹر) بھی استعمال کی جا سکتی ہے، لیکن پورے سسٹم کی قیمت نسبتاً مہنگی ہے، اس لیے یہ شاذ و نادر ہی استعمال ہوتی ہے۔
سٹیپر موٹر سائز:
ہمارے پاس اس وقت 20mm(NEMA8)، 28mm(NEMA11)، 35mm(NEMA14)، 42mm(NEMA17)، 57mm(NEMA23)، 86mm(NEMA34) ہائبرڈ سٹیپر موٹرز ہیں۔ ہم تجویز کرتے ہیں کہ پہلے موٹر سائز کا تعین کریں، پھر دوسرے پیرامیٹر کی تصدیق کریں، جب آپ ہائبرڈ سٹیپر موٹر کا انتخاب کریں۔
حسب ضرورت سروس
موٹر کے ڈیزائن کو کسٹمر کی ضروریات کی بنیاد پر ایڈجسٹ کیا جا سکتا ہے بشمول:
موٹر کا قطر: ہمارے پاس 6mm، 8mm، 10mm، 15mm اور 20mm قطر والی موٹر ہے
کنڈلی مزاحمت / درجہ بند وولٹیج: کنڈلی مزاحمت ایڈجسٹ ہے، اور زیادہ مزاحمت کے ساتھ، موٹر کی درجہ بندی کی وولٹیج زیادہ ہے.
بریکٹ ڈیزائن/ لیڈ سکرو کی لمبائی: اگر گاہک چاہتے ہیں کہ بریکٹ کو لمبا/چھوٹا ہو، خاص ڈیزائن جیسے بڑھتے ہوئے سوراخوں کے ساتھ، یہ ایڈجسٹ ہے۔
پی سی بی + کیبلز + کنیکٹر: پی سی بی کا ڈیزائن، کیبل کی لمبائی اور کنیکٹر پچ سب ایڈجسٹ ہیں، اگر صارفین کو ضرورت ہو تو انہیں ایف پی سی میں تبدیل کیا جا سکتا ہے۔
لیڈ ٹائم
اگر ہمارے پاس اسٹاک میں نمونے ہیں، تو ہم 3 دن میں نمونے بھیج سکتے ہیں۔
اگر ہمارے پاس اسٹاک میں نمونے نہیں ہیں، تو ہمیں انہیں تیار کرنے کی ضرورت ہے، پیداوار کا وقت تقریباً 20 کیلنڈر دن ہے۔
بڑے پیمانے پر پیداوار کے لئے، لیڈ ٹائم آرڈر کی مقدار پر منحصر ہے.
ادائیگی کا طریقہ اور ادائیگی کی شرائط
نمونے کے لئے، عام طور پر ہم پے پال یا علی بابا کو قبول کرتے ہیں.
بڑے پیمانے پر پیداوار کے لیے، ہم T/T ادائیگی قبول کرتے ہیں۔
نمونے کے لئے، ہم پیداوار سے پہلے مکمل ادائیگی جمع کرتے ہیں.
بڑے پیمانے پر پیداوار کے لیے، ہم پیداوار سے پہلے 50% قبل از ادائیگی قبول کر سکتے ہیں، اور باقی 50% ادائیگی شپمنٹ سے پہلے جمع کر سکتے ہیں۔
6 بار سے زیادہ آرڈر کرنے کے بعد، ہم ادائیگی کی دیگر شرائط جیسے کہ A/S (نظر کے بعد) پر گفت و شنید کر سکتے ہیں۔
اکثر پوچھے گئے سوالات
1. نمونے کے لئے عام ترسیل کا وقت کتنا طویل ہے؟ بیک اینڈ بڑے آرڈرز کی ترسیل کا وقت کتنا ہے؟
نمونہ آرڈر لیڈ ٹائم تقریبا 15 دن ہے، بڑے پیمانے پر مقدار آرڈر لیڈ ٹائم 25-30 دن ہے.
2. کیا آپ اپنی مرضی کی خدمات کو قبول کرتے ہیں؟
ہم اپنی مرضی کے مطابق مصنوعات کو قبول کرتے ہیں۔ بشمول موٹر پیرامیٹر، لیڈ وائر کی قسم، آؤٹ شافٹ وغیرہ۔
3. کیا اس موٹر میں انکوڈر شامل کرنا ممکن ہے؟
اس قسم کی موٹر کے لیے، ہم موٹر پہننے کی ٹوپی پر انکوڈر شامل کر سکتے ہیں۔
اکثر پوچھے جانے والے سوال
1. سٹیپر موٹرز کی بائی پولر اور یونی پولر وائرنگ میں کیا فرق ہے؟
بائی پولر کنکشن والی سٹیپر موٹرز ایک ڈرائیو کا طریقہ استعمال کرتی ہیں جس میں کرنٹ ایک وائنڈنگ (بائپولر ڈرائیو) میں دونوں سمتوں میں بہتا ہے۔
سنگل پول کنکشن والی سٹیپر موٹر میں ایک مرکزی نل ہوتا ہے اور وہ ڈرائیو کا طریقہ استعمال کرتا ہے جس میں کرنٹ ہمیشہ ایک وائنڈنگ (سنگل پول ڈرائیو) میں ایک مقررہ سمت میں بہتا ہے۔
2. اسٹارٹ سٹاپ آپریشن موڈ میں سٹیپر موٹر وجوہات اور پروسیسنگ کے طریقوں کو شروع نہیں کر سکتے ہیں
a.load بہت بڑا ہے: موٹر کے انتخاب میں خرابی، موٹر کا ایک بڑا سائز منتخب کریں۔
b.frequency بہت زیادہ ہے: تعدد کو کم کریں۔
c.اگر موٹر آگے پیچھے چلتی ہے، یا ٹارک بہت چھوٹا ہے، جو اس بات کی نشاندہی کرتا ہے کہ فیز کو نقصان پہنچا ہے، یا ٹوٹا ہوا سرکٹ ہے: موٹر کو تبدیل کریں یا مرمت کریں۔
d. فیز کرنٹ کافی نہیں ہے: فیز کرنٹ میں اضافہ کریں، کم از کم شروع کرنے کے پہلے چند مراحل کے لیے
3. سٹیپر موٹرز کے اسباب اور حل جو تیز رفتاری کو مکمل کرتے ہیں لیکن جب وہ مستحکم رفتار تک پہنچ جاتے ہیں تو گھومنا بند کر دیتے ہیں۔
وجہ: سٹیپر موٹر اپنی صلاحیت کی حد پر چل رہی ہے اور ضرورت سے زیادہ سرعت کی وجہ سے رک جاتی ہے۔ روٹر ہلتا ہے اور غیر مستحکم چلتا ہے۔
حل۔
①سرعت کو کم کریں، یعنی کم سرعت کا انتخاب کریں یا دو مختلف سرعت کی سطحیں استعمال کریں، شروع میں زیادہ اور زیادہ سے زیادہ رفتار کے قریب کم۔
② ٹارک میں اضافہ کریں۔
③عقبی شافٹ میں مکینیکل ڈیمپر شامل کریں، لیکن اس سے روٹر کی جڑت بڑھ جاتی ہے
④سب ڈویژن ڈرائیو لیں۔
اپنا پیغام ہمیں بھیجیں:
مصنوعات کے زمرے
-
NEMA11 28mm لکیری ہائبرڈ سٹیپر موٹر نان کیپ...
-

28 ملی میٹر سائز NEMA11 ہائبرڈ سٹیپر موٹر 1.8 ڈگری...
-

ہائی پریسجن 42 ملی میٹر سٹیپر موٹر NEMA 17 ہائبری...
-
20 ملی میٹر NEMA8 لکیری ہائبرڈ سٹیپر موٹر رن کے ساتھ...
-

پلانیٹری گیئر باکس سٹیپر موٹر 35mm (NEMA 14)...
-

ہائی ٹارک NEMA 23 ہائبرڈ سٹیپر موٹر 57mm m...