




پرنٹر کے لیے ہائی ٹارک مائیکرو 35 ملی میٹر سٹیپر موٹر
تفصیل
سٹیپر موٹرز کے لیے سمیٹنے کے دو طریقے ہیں: بائی پولر اور یونی پولر۔
1. بائپولر موٹرز
ہماری دوئبرووی موٹرز میں عام طور پر صرف دو فیز ہوتے ہیں، فیز A اور فیز B، اور ہر فیز میں دو باہر جانے والی تاریں ہوتی ہیں، جو الگ الگ سمیٹتی ہیں۔ دونوں مراحل کے درمیان کوئی تعلق نہیں ہے۔ بائپولر موٹرز میں 4 باہر جانے والی تاریں ہوتی ہیں۔
2. یونی پولر موٹرز
ہماری یونی پولر موٹرز کے عام طور پر چار مراحل ہوتے ہیں۔ دوئبرووی موٹروں کے دو مراحل کی بنیاد پر، دو مشترکہ لائنیں شامل کی جاتی ہیں۔
اگر عام تاریں آپس میں جڑی ہوں تو باہر جانے والی تاریں 5 تاریں ہیں۔
اگر عام تاریں آپس میں منسلک نہیں ہیں تو باہر جانے والی تاریں 6 تاریں ہیں۔
ایک قطبی موٹر میں 5 یا 6 باہر جانے والی لائنیں ہوتی ہیں۔
پیرامیٹرز
| وولٹیج | 8 ڈی وی ڈی سی |
| فیز کی تعداد | 4 مرحلہ |
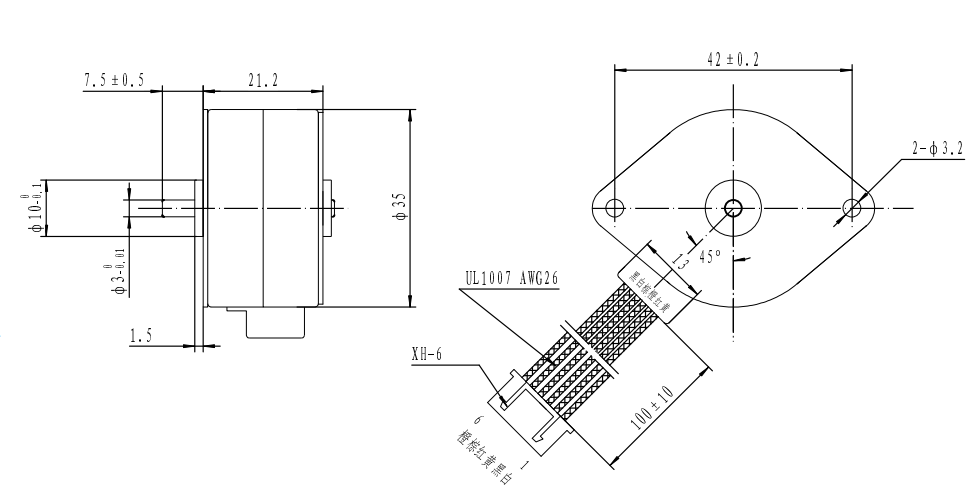
| سٹیپ اینگل | 7.5°±7% |
| سمیٹ مزاحمت (25℃) | 16Ω±10% |
| موجودہ مرحلہ | 0.5A |
| ڈیٹنٹ ٹارک | ≤110 گرام سینٹی میٹر |
| زیادہ سے زیادہ پل ان ریٹ | 400PPS |
| ٹارک ہولڈنگ | 450 گرام سینٹی میٹر |
| ہوا کا درجہ حرارت | ≤85K |
| ڈڈلیکٹرک طاقت | 600 VAC 1SEC 1mA |
ڈیزائن ڈرائنگ
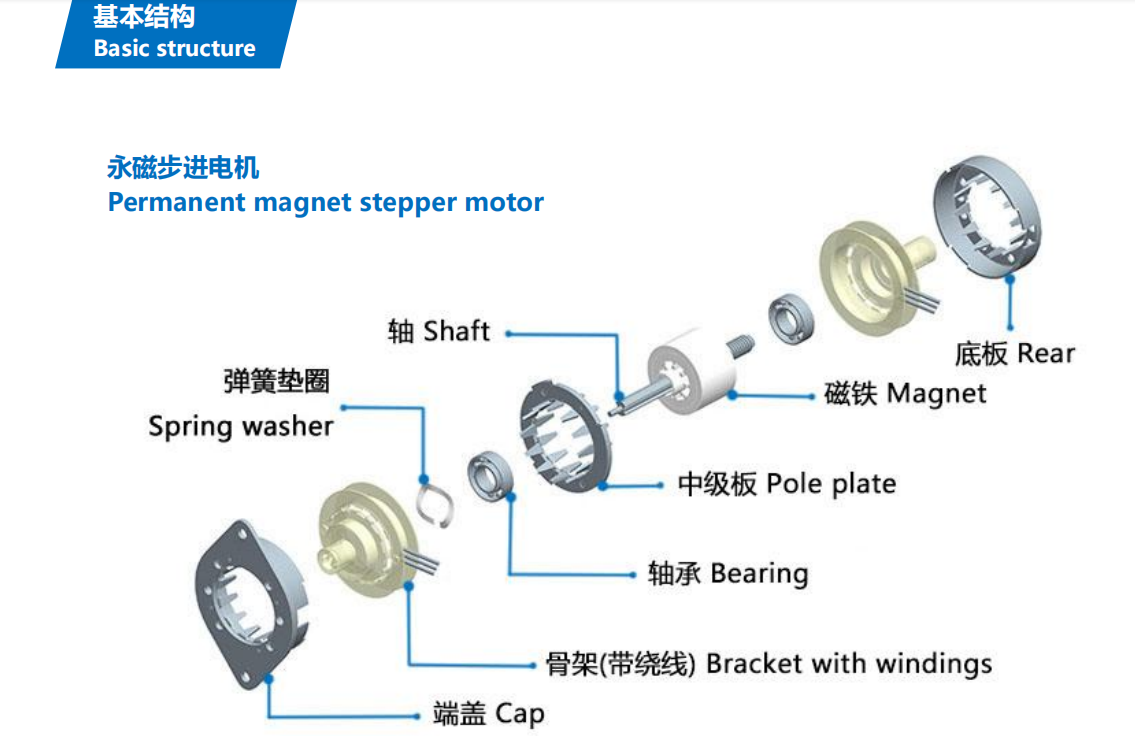
پی ایم سٹیپر موٹر کی بنیادی ساخت کے بارے میں
خصوصیات اور فائدہ
1. اعلی صحت سے متعلق پوزیشننگ
چونکہ سٹیپرز عین دہرائے جانے والے مراحل میں حرکت کرتے ہیں، اس لیے وہ ان ایپلی کیشنز میں سبقت لے جاتے ہیں جن کے لیے عین ضرورت ہوتی ہے۔
پوزیشننگ، قدموں کی تعداد کے حساب سے موٹر حرکت کرتی ہے۔
2. اعلی صحت سے متعلق رفتار کنٹرول
نقل و حرکت کے عین مطابق اضافہ عمل کے لیے گردشی رفتار کے بہترین کنٹرول کی بھی اجازت دیتا ہے۔
آٹومیشن اور روبوٹکس. گردش کی رفتار کا تعین دالوں کی تعدد سے ہوتا ہے۔
3. موقوف اور منعقد تقریب
ڈرائیو کے کنٹرول کے ساتھ، موٹر میں لاک فنکشن ہوتا ہے (موٹر وائنڈنگز کے ذریعے کرنٹ ہوتا ہے، لیکن
موٹر گھومتی نہیں ہے) اور اب بھی ہولڈنگ ٹارک آؤٹ پٹ ہے۔
4. لمبی زندگی اور کم برقی مقناطیسی مداخلت
سٹیپر موٹر میں کوئی برش نہیں ہے، اور اسے برش کی طرح برش سے تبدیل کرنے کی ضرورت نہیں ہے
ڈی سی موٹر۔ برش کا کوئی رگڑ نہیں ہے، جو سروس کی زندگی کو بڑھاتا ہے، کوئی برقی چنگاری نہیں ہے، اور برقی مقناطیسی مداخلت کو کم کرتا ہے۔
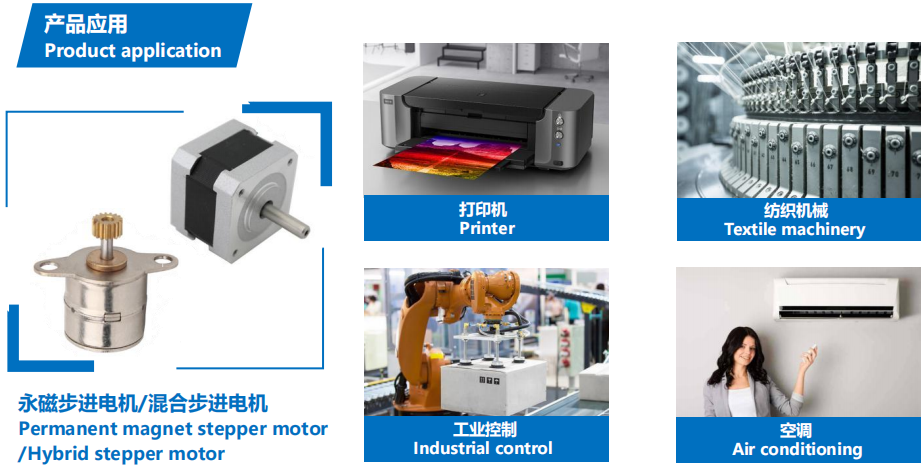
پی ایم سٹیپر موٹر کی درخواست
پرنٹر
ٹیکسٹائل مشینری
صنعتی کنٹرول
ایئر کنڈیشنگ
سٹیپر موٹر کے کام کرنے کا اصول
سٹیپر موٹر کی ڈرائیو کو سافٹ ویئر کے ذریعے کنٹرول کیا جاتا ہے۔ جب موٹر کو گھومنے کی ضرورت ہوتی ہے، ڈرائیو کرے گا
سٹیپر موٹر کی دالیں لگائیں۔ یہ دالیں سٹیپر موٹرز کو ایک مخصوص ترتیب میں توانائی بخشتی ہیں۔
موٹر کا روٹر ایک مخصوص سمت (گھڑی کی سمت یا گھڑی کی مخالف سمت) میں گھومنے کا سبب بنتا ہے۔ تاکہ
موٹر کی مناسب گردش کا احساس کریں۔ ہر بار جب موٹر ڈرائیور سے پلس وصول کرتی ہے، یہ ایک قدمی زاویہ (مکمل قدمی ڈرائیو کے ساتھ) سے گھومتی ہے، اور موٹر کا گردشی زاویہ چلنے والی دالوں کی تعداد اور قدمی زاویہ سے متعین ہوتا ہے۔
لیڈ ٹائم اور پیکیجنگ کی معلومات
نمونے کے لیے لیڈ ٹائم:
اسٹاک میں معیاری موٹرز: 3 دن کے اندر
معیاری موٹرز اسٹاک میں نہیں ہیں: 15 دن کے اندر
اپنی مرضی کے مطابق مصنوعات: تقریبا 25 ~ 30 دن (حسب ضرورت کی پیچیدگی پر مبنی)
نیا سانچہ بنانے کے لیے لیڈ ٹائم: عام طور پر تقریباً 45 دن
بڑے پیمانے پر پیداوار کے لیے لیڈ ٹائم: آرڈر کی مقدار پر مبنی
پیکجنگ:
نمونے ایک کاغذ کے خانے کے ساتھ فوم سپنج میں پیک کیے جاتے ہیں، ایکسپریس کے ذریعے بھیجے جاتے ہیں۔
بڑے پیمانے پر پیداوار، موٹرز باہر شفاف فلم کے ساتھ نالیدار کارٹن میں پیک کر رہے ہیں. (ہوا کے ذریعے ترسیل)
اگر سمندر کے ذریعے بھیج دیا جاتا ہے تو، مصنوعات کو pallets پر پیک کیا جائے گا

ادائیگی کا طریقہ اور ادائیگی کی شرائط
نمونے کے لئے، عام طور پر ہم پے پال یا علی بابا کو قبول کرتے ہیں.
بڑے پیمانے پر پیداوار کے لئے، ہم T/T ادائیگی قبول کرتے ہیں.
نمونے کے لئے، ہم پیداوار سے پہلے مکمل ادائیگی جمع کرتے ہیں.
بڑے پیمانے پر پیداوار کے لیے، ہم پیداوار سے پہلے 50% قبل از ادائیگی قبول کر سکتے ہیں، اور باقی 50% ادائیگی شپمنٹ سے پہلے جمع کر سکتے ہیں۔
6 بار سے زیادہ آرڈر کرنے کے بعد، ہم ادائیگی کی دیگر شرائط جیسے کہ A/S (نظر کے بعد) پر گفت و شنید کر سکتے ہیں۔
اپنا پیغام ہمیں بھیجیں:
مصنوعات کے زمرے
-

20 ملی میٹر مائیکرو سٹیپر موٹر کو جی کے ساتھ ملایا جا سکتا ہے...
-

15 بائی مائیکرو سٹیپ پی آر موٹر 2 فیز 4 وائر 18 ڈگری...
-

کم شور اعلی معیار 3.3V 6mm مائکرو سٹیپر میٹر...
-
8 ملی میٹر منی مائیکرو سٹیپر موٹر 2 فیز 18 ڈگری...
-

10BY mini 5v 10mm قطر کی مائکرو سٹیپر موٹر...
-

20 ملی میٹر مستقل مقناطیس 12 وی مائکرو سٹیپر موٹر کے لیے...