





نیما 23 (57 ملی میٹر) ہائبرڈ بال سکرو سٹیپر موٹر 1.8° سٹیپ اینگل 4 طبی تشخیصی آلات کے لیے لیڈ وائر
نیما 23 (57 ملی میٹر) ہائبرڈ بال سکرو سٹیپر موٹر 1.8° سٹیپ اینگل 4 طبی تشخیصی آلات کے لیے لیڈ وائر
نیما 23 (57 ملی میٹر) ہائبرڈ سٹیپر موٹر، بائی پولر، 4 لیڈ، بال سکرو، کم شور، لمبی زندگی، اعلیٰ کارکردگی، CE اور RoHS سرٹیفائیڈ۔
بڑی بوجھ کی گنجائش، چھوٹی کمپن، کم شور، تیز رفتار، تیز ردعمل، ہموار آپریشن، لمبی زندگی، اعلی پوزیشننگ کی درستگی (±0.005mm تک)
تفصیل
| پروڈکٹ کا نام | 57 ملی میٹر ہائبرڈ بال سکرو سٹیپر موٹر |
| ماڈل | VSM57BSHSM |
| قسم | ہائبرڈ سٹیپر موٹرز |
| سٹیپ اینگل | 1.8° |
| وولٹیج (V) | 2.3 / 3 / 3.1 / 3.8 |
| موجودہ (A) | 3/4 |
| مزاحمت (اوہم) | 0.75 / 1 / 0.78 / 0.95 |
| انڈکٹنس (mH) | 2.5 / 4.5 / 3.3 / 4.5 |
| لیڈ وائرز | 4 |
| موٹر کی لمبائی (ملی میٹر) | 45/55/65/75 |
| محیطی درجہ حرارت | -20℃ ~ +50℃ |
| درجہ حرارت میں اضافہ | 80K زیادہ سے زیادہ |
| ڈائی الیکٹرک طاقت | 1mA زیادہ سے زیادہ @ 500V، 1KHz، 1Sec۔ |
| موصلیت مزاحمت | 100MΩ منٹ @500Vdc |
سرٹیفیکیشنز

برقی پیرامیٹرز:
| موٹر سائز | وولٹیج /فیز (V) | کرنٹ /فیز (ا) | مزاحمت /فیز (Ω) | انڈکٹنس /فیز (mH) | کی تعداد لیڈ وائرز | روٹر جڑتا (g.cm2) | موٹر وزن (جی) | موٹر کی لمبائی L (ملی میٹر) |
| 57 | 2.3 | 3 | 0.75 | 2.5 | 4 | 150 | 580 | 45 |
| 57 | 3 | 3 | 1 | 4.5 | 4 | 300 | 710 | 55 |
| 57 | 3.1 | 4 | 0.78 | 3.3 | 4 | 400 | 880 | 65 |
| 57 | 3.8 | 4 | 0.95 | 4.5 | 4 | 480 | 950 | 75 |
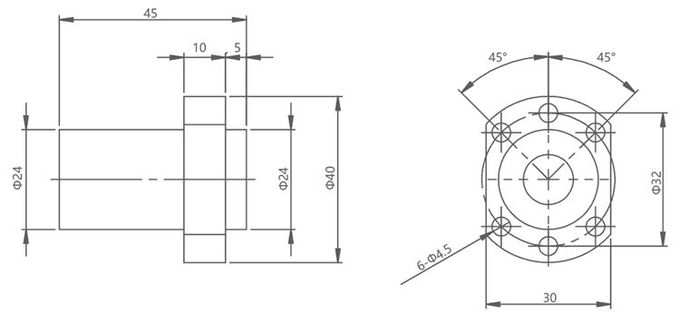
VSM57BSHSM معیاری بیرونی موٹر آؤٹ لائن ڈرائنگ:
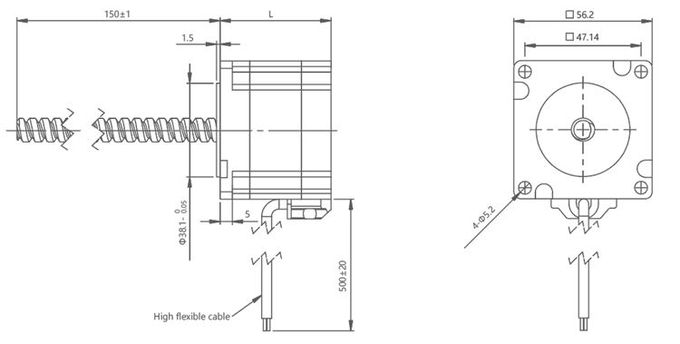
نوٹس:
لیڈ سکرو کی لمبائی اپنی مرضی کے مطابق کیا جا سکتا ہے
اپنی مرضی کے مطابق مشینی لیڈ سکرو کے آخر میں قابل عمل ہے۔
براہ کرم مزید بال سکرو وضاحتیں کے لیے ہم سے رابطہ کریں۔
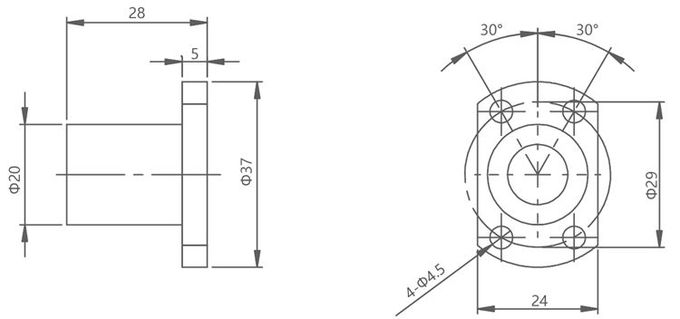
VSM57BSHSMBبال نٹ 1202 آؤٹ لائن ڈرائنگ:
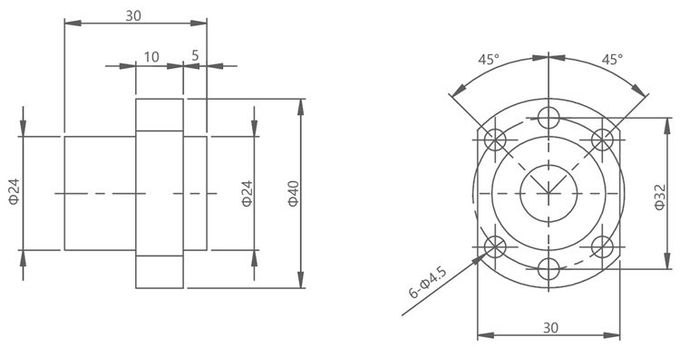
VSM57BSHSMBبال نٹ 1205 آؤٹ لائن ڈرائنگ:
VSM57BSHSMBبال نٹ 1210 آؤٹ لائن ڈرائنگ:
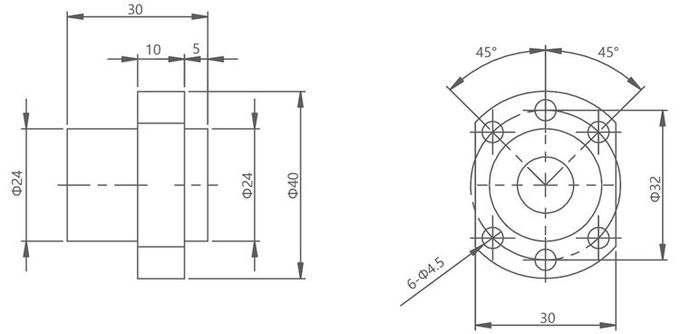
VSM57BSHSMBبال نٹ 1210 آؤٹ لائن ڈرائنگ:
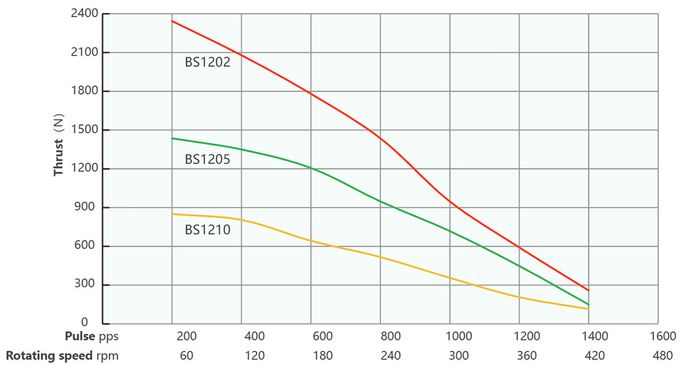
رفتار اور زور وکر
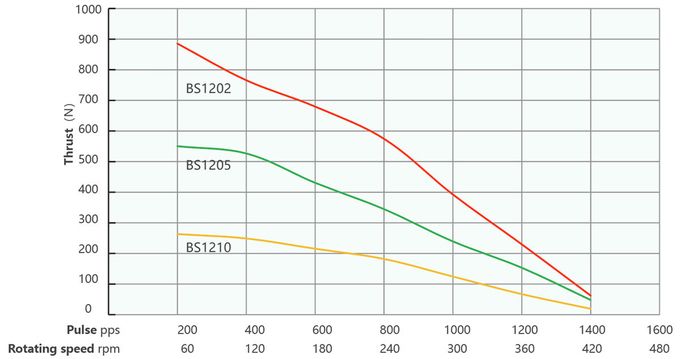
57 سیریز 45 ملی میٹر موٹر لمبائی دوئبرووی ہیلی کاپٹر ڈرائیو
100% کرنٹ پلس فریکوئنسی اور تھرسٹ وکر
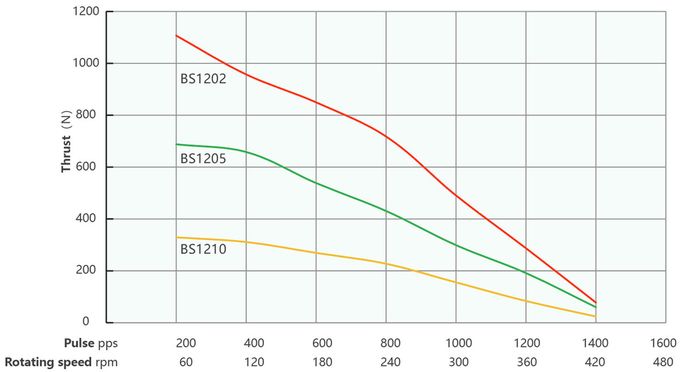
57 سیریز 55mm موٹر لمبائی دوئبرووی ہیلی کاپٹر ڈرائیو
100% کرنٹ پلس فریکوئنسی اور تھرسٹ وکر
| لیڈ (ملی میٹر) | لکیری رفتار (ملی میٹر/سیکنڈ) | |||||||
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
ٹیسٹ کی شرط:ہیلی کاپٹر ڈرائیو، کوئی ریمپنگ نہیں، آدھا مائیکرو اسٹیپنگ، ڈرائیو وولٹیج 40V
57 سیریز 65 ملی میٹر موٹر کی لمبائی بائپولر ہیلی کاپٹر ڈرائیو
100% کرنٹ پلس فریکوئنسی اور تھرسٹ وکر
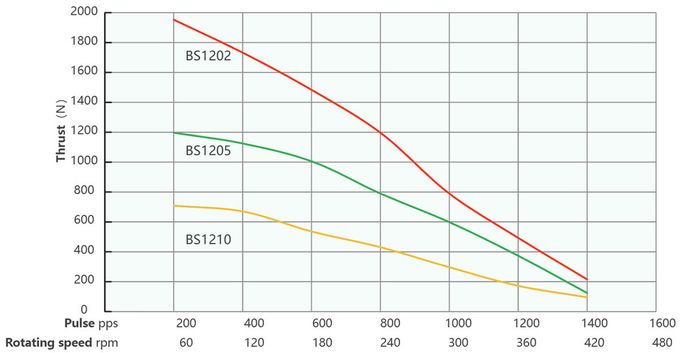
57 سیریز 75 ملی میٹر موٹر کی لمبائی بائپولر ہیلی کاپٹر ڈرائیو
100% کرنٹ پلس فریکوئنسی اور تھرسٹ وکر
| لیڈ (ملی میٹر) | لکیری رفتار (ملی میٹر/سیکنڈ) | |||||||
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 |
| 5 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| 10 | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
ٹیسٹ کی شرط:ہیلی کاپٹر ڈرائیو، کوئی ریمپنگ نہیں، آدھا مائیکرو اسٹیپنگ، ڈرائیو وولٹیج 40V
درخواست کے علاقے:
طبی تشخیصی سامان:57 ملی میٹر ہائبرڈ بال سکرو سٹیپر موٹرز طبی تشخیصی آلات جیسے امیج سکینر، سی ٹی سکینر، ایکس رے آلات، ایم آر آئی آلات وغیرہ میں استعمال کی جا سکتی ہیں۔ ان کی اعلی درستگی پوزیشن کنٹرول اور استحکام طبی تصویر کے حصول اور پروسیسنگ کے دوران عین مطابق حرکت اور پوزیشننگ کو قابل بناتا ہے۔
لائف سائنس کے آلات:لائف سائنس ریسرچ اور تجربات میں، 57 ملی میٹر ہائبرڈ بال سکرو سٹیپر موٹرز خودکار مائع ہینڈلنگ سسٹمز، ہائی تھرو پٹ اسکریننگ آلات، سیل کلچر ڈیوائسز، جین سیکوینسر وغیرہ میں استعمال ہوتی ہیں۔ ان موٹروں کی اعلیٰ درستگی اور وشوسنییتا انہیں تجرباتی آلات میں عین موشن اور پوزیشن کنٹرول کی مانگ کو پورا کرنے کے قابل بناتی ہے۔
روبوٹکس:57 ملی میٹر ہائبرڈ بال اسکرو سٹیپر موٹرز بڑے پیمانے پر جوائنٹ ڈرائیوز، روبوٹک آرم موشن، اور درست پوزیشننگ کے لیے روبوٹکس میں استعمال ہوتی ہیں۔ روبوٹکس ایپلی کیشنز میں درست حرکت اور کنٹرول کی مانگ کو پورا کرنے کے لیے یہ موٹریں ہائی ٹارک، ہائی ریزولوشن اور کم شور کی خصوصیات ہیں۔
لیزر کا سامان:57 ملی میٹر ہائبرڈ بال سکرو سٹیپر موٹرز کو لیزر آلات میں فوکس ایڈجسٹمنٹ، پیننگ ٹیبل، اور آپٹیکل پاتھ کنٹرول جیسے کاموں کے لیے استعمال کیا جا سکتا ہے۔ اس کا اعلی صحت سے متعلق پوزیشن کنٹرول اور استحکام اسے لیزر بیم کے عین مطابق فوکس اور پوزیشننگ کا احساس کرنے کے قابل بناتا ہے۔
تجزیاتی آلات:مختلف قسم کے لیبارٹری تجزیاتی آلات میں، 57 ملی میٹر ہائبرڈ بال اسکرو سٹیپر موٹرز کو خودکار نمونہ پروسیسنگ، نمونہ فیڈنگ سسٹم، مائع کرومیٹوگرافس، گیس کرومیٹوگرافس وغیرہ میں استعمال کیا جا سکتا ہے۔ ان موٹروں کی اعلیٰ درستگی کی حرکت اور مستحکم کارکردگی لیبارٹری کی بہتری اور کارکردگی میں اہم کردار ادا کرتی ہے۔
سیمی کنڈکٹر اور الیکٹرانک پیداوار کا سامان:57 ملی میٹر ہائبرڈ بال سکرو سٹیپر موٹرز سیمی کنڈکٹر اور الیکٹرانک پروڈکشن آلات میں درست پوزیشننگ اور آٹومیشن کنٹرول کے لیے استعمال کی جاتی ہیں۔ مثال کے طور پر، وہ سیمی کنڈکٹر چپ ٹیسٹ کے سامان، پیکیجنگ مشینیں، سطحی ماؤنٹ ٹیکنالوجی، پرنٹ شدہ سرکٹ بورڈ مینوفیکچرنگ اور دیگر شعبوں میں تیز رفتار، اعلیٰ درستگی اور قابل اعتماد موشن کنٹرول فراہم کرنے کے لیے استعمال کیے جا سکتے ہیں۔
غیر معیاری آٹومیشن کا سامان اور مختلف قسم کے آٹومیشن آلات:57mm ہائبرڈ بال سکرو سٹیپر موٹرز غیر معیاری آٹومیشن آلات اور خودکار پروڈکشن لائنوں کی وسیع رینج کے لیے موزوں ہیں۔ انہیں پوزیشننگ کے سازوسامان، خودکار اسمبلی سسٹم، پیکیجنگ کا سامان، پرنٹنگ مشینری، ٹیکسٹائل کا سامان وغیرہ میں استعمال کیا جا سکتا ہے۔ یہ مختلف شعبوں میں آٹومیشن کی ضروریات کو پورا کرنے کے لیے درست پوزیشن کنٹرول اور قابل اعتماد حرکت کی کارکردگی فراہم کرتے ہیں۔
فائدہ
ہائی ٹارک ٹو جڑتا تناسب:ہائبرڈ بال اسکرو سٹیپر موٹرز میں ٹارک ٹو جڑتا تناسب زیادہ ہوتا ہے، جس کا مطلب ہے کہ وہ اپنے سائز اور وزن کے لحاظ سے اہم ٹارک آؤٹ پٹ فراہم کر سکتے ہیں۔ یہ انہیں ایسی ایپلی کیشنز کے لیے مثالی بناتا ہے جن کو کمپیکٹ فارم فیکٹر میں زیادہ ٹارک کی ضرورت ہوتی ہے، جیسے روبوٹکس، CNC مشینیں، اور آٹومیشن سسٹم۔
تیز رفتاری اور تنزلی:یہ موٹریں تیز رفتاری اور سست رفتاری کی صلاحیت رکھتی ہیں، جس سے فوری اور عین مطابق حرکت کی جاسکتی ہے۔ روٹر کی کم جڑتا اور زیادہ ٹارک آؤٹ پٹ موٹر کو سگنلز کو کنٹرول کرنے کے لیے تیزی سے جواب دینے کے قابل بناتا ہے، جس کے نتیجے میں شروع ہونے کا وقت تیز ہوتا ہے اور نظام کی مجموعی کارکردگی بہتر ہوتی ہے۔
ہموار مائیکرو اسٹیپنگ:ہائبرڈ بال سکرو سٹیپر موٹرز مائیکرو سٹیپنگ آپریشن کے لیے اچھی طرح سے موزوں ہیں، جو بہتر ریزولوشن اور ہموار موشن کنٹرول کی اجازت دیتی ہیں۔ مائیکرو اسٹیپنگ ہر پورے قدم کو چھوٹے ذیلی مراحل میں تقسیم کرتی ہے، قدم کے سائز کو کم کرتی ہے اور کمپن، شور، اور گونج کے اثرات کو کم کرتی ہے۔ یہ خصوصیت ان ایپلی کیشنز میں خاص طور پر فائدہ مند ہے جن کے لیے ہموار اور درست حرکت کی ضرورت ہوتی ہے، جیسے کہ 3D پرنٹرز اور لکیری پوزیشننگ سسٹم۔
پست ردعمل:ان موٹروں میں بال سکرو میکانزم ردعمل کو کم سے کم کرنے میں مدد کرتا ہے، جو روٹر اور بوجھ کے درمیان کھیل یا کلیئرنس ہے۔ کم بیکلاش درست پوزیشننگ اور ریپیٹ ایبلٹی کو یقینی بناتا ہے، کیونکہ سمتوں کو تبدیل کرنے یا حرکت کو الٹتے وقت کم سے کم حرکت ہوتی ہے۔ یہ ان ایپلی کیشنز کے لیے بہت اہم ہے جن کے لیے درست اور دوبارہ قابل پوزیشننگ کی ضرورت ہوتی ہے، جیسے پک اینڈ پلیس مشینیں اور آپٹیکل سسٹم۔
ہائی ڈائنامک رسپانس:ہائبرڈ سٹیپر موٹر اور بال سکرو میکانزم کا امتزاج اعلی متحرک ردعمل کی اجازت دیتا ہے، یعنی موٹر کنٹرول سگنل میں ہونے والی تبدیلیوں کو تیزی سے اور درست طریقے سے پیروی کر سکتی ہے۔ یہ ردعمل ان ایپلی کیشنز کے لیے ضروری ہے جن میں رفتار، سمت یا پوزیشن میں تیز رفتار تبدیلیاں شامل ہوں، جیسے کہ تیز رفتار مشینی اور متحرک موشن کنٹرول سسٹم۔
تھرمل کارکردگی:ہائبرڈ بال اسکرو اسٹیپر موٹرز کو اچھی تھرمل کارکردگی رکھنے کے لیے ڈیزائن کیا گیا ہے، جس سے آپریشن کے دوران گرمی کی موثر کھپت ممکن ہوتی ہے۔ یہ زیادہ گرمی کو روکنے میں مدد کرتا ہے اور موٹر کی مستحکم کارکردگی کو یقینی بناتا ہے، یہاں تک کہ طویل استعمال کے دوران یا درخواست کی طلب میں۔
سرمایہ کاری مؤثر حل:ہائبرڈ بال اسکرو سٹیپر موٹرز ان ایپلی کیشنز کے لیے ایک سرمایہ کاری مؤثر حل پیش کرتی ہیں جن کے لیے اعلیٰ درستگی اور ٹارک کی ضرورت ہوتی ہے۔ زیادہ پیچیدہ اور مہنگے سروو موٹر سسٹمز کے مقابلے میں، ہائبرڈ سٹیپر موٹرز کارکردگی، لاگت اور استعمال میں آسانی کے درمیان توازن فراہم کرتی ہیں۔ وہ اکثر ایپلی کیشنز کے لیے ترجیحی انتخاب ہوتے ہیں جہاں قیمت ایک اہم عنصر ہے، معیار اور کارکردگی پر سمجھوتہ کیے بغیر۔
موٹر انتخاب کے تقاضے:
► نقل و حرکت/ بڑھتے ہوئے سمت
►لوڈ کی ضروریات
►سٹروک کے تقاضے
►مشیننگ کی ضروریات کو ختم کریں۔
► صحت سے متعلق تقاضے
► انکوڈر فیڈ بیک کے تقاضے
► دستی ایڈجسٹمنٹ کے تقاضے
►ماحولیاتی تقاضے
پیداواری ورکشاپ






