





نیما 11 (28 ملی میٹر) ہائبرڈ بال سکرو سٹیپر موٹر 1.8° سٹیپ اینگل وولٹیج 2.1 / 3.7V کرنٹ 1A,4 لیڈ وائرز
نیما 11 (28 ملی میٹر) ہائبرڈ بال سکرو سٹیپر موٹر 1.8° سٹیپ اینگل وولٹیج 2.1 / 3.7V کرنٹ 1A,4 لیڈ وائرز
نیما 11 (28 ملی میٹر) ہائبرڈ سٹیپر موٹر، بائی پولر، 4 لیڈ، بال سکرو، کم شور، لمبی زندگی، اعلی کارکردگی، CE اور RoHS تصدیق شدہ۔
تفصیل
| پروڈکٹ کا نام | 28 ملی میٹر ہائبرڈ بال سکرو سٹیپر موٹر |
| ماڈل | VSM28BSHSM |
| قسم | ہائبرڈ سٹیپر موٹرز |
| سٹیپ اینگل | 1.8° |
| وولٹیج (V) | 2.1 / 3.7 |
| موجودہ (A) | 1 |
| مزاحمت (اوہم) | 2.1 / 3.7 |
| انڈکٹنس (mH) | 1.5 / 2.3 |
| لیڈ وائرز | 4 |
| موٹر کی لمبائی (ملی میٹر) | 34/45 |
| محیطی درجہ حرارت | -20℃ ~ +50℃ |
| درجہ حرارت میں اضافہ | 80K زیادہ سے زیادہ |
| ڈائی الیکٹرک طاقت | 1mA زیادہ سے زیادہ @ 500V، 1KHz، 1Sec۔ |
| موصلیت مزاحمت | 100MΩ منٹ @500Vdc |
سرٹیفیکیشنز

برقی پیرامیٹرز:
| موٹر سائز | وولٹیج /فیز (V) | کرنٹ /فیز (ا) | مزاحمت /فیز (Ω) | انڈکٹنس /فیز (mH) | کی تعداد لیڈ وائرز | روٹر جڑتا (g.cm2) | موٹر وزن (جی) | موٹر کی لمبائی L (ملی میٹر) |
| 28 | 2.1 | 1 | 2.1 | 1.5 | 4 | 9 | 120 | 34 |
| 28 | 3.7 | 1 | 3.7 | 2.3 | 4 | 13 | 180 | 45 |
VSM20BSHSM معیاری بیرونی موٹر آؤٹ لائن ڈرائنگ
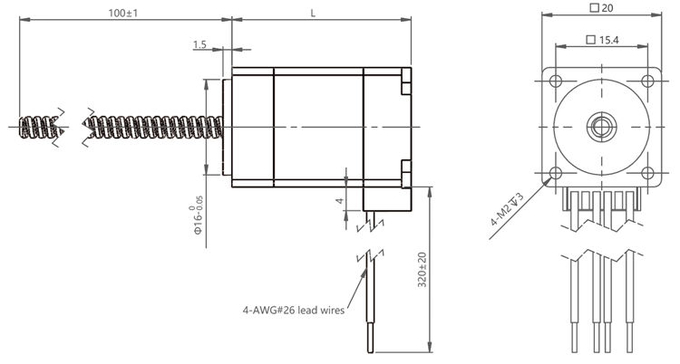
نوٹس:
لیڈ سکرو کی لمبائی اپنی مرضی کے مطابق کیا جا سکتا ہے
اپنی مرضی کے مطابق مشینی لیڈ سکرو کے آخر میں قابل عمل ہے۔
براہ کرم مزید بال سکرو وضاحتیں کے لیے ہم سے رابطہ کریں۔
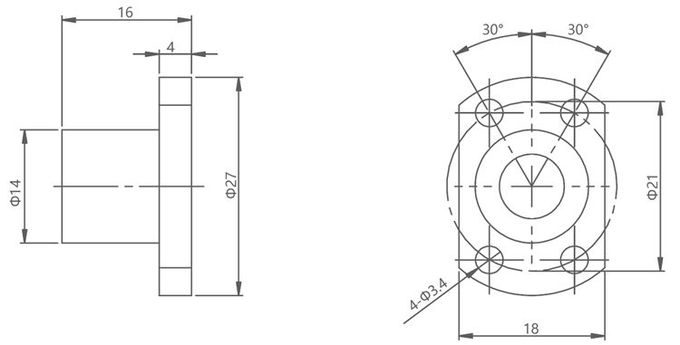
VSM20BSHSMBبال نٹ 0601 آؤٹ لائن ڈرائنگ:
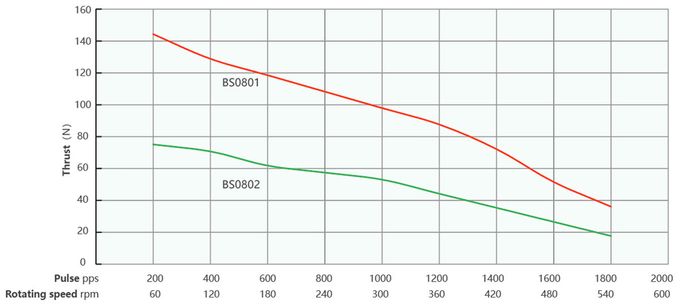
رفتار اور زور وکر
28 سیریز 34 ملی میٹر موٹر کی لمبائی بائپولر ہیلی کاپٹر ڈرائیو
100% کرنٹ پلس فریکوئنسی اور تھرسٹ وکر
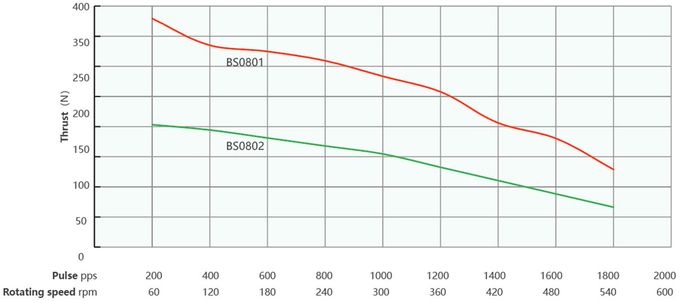
28 سیریز 45 ملی میٹر موٹر کی لمبائی دوئبرووی ہیلی کاپٹر ڈرائیو
100% کرنٹ پلس فریکوئنسی اور تھرسٹ وکر
| لیڈ (ملی میٹر) | لکیری رفتار (ملی میٹر/سیکنڈ) | |||||||||
| 1 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 2 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 | 18 | 20 |
ٹیسٹ کی شرط:ہیلی کاپٹر ڈرائیو، کوئی ریمپنگ نہیں، آدھا مائیکرو اسٹیپنگ، ڈرائیو وولٹیج 24V
درخواست کے علاقے:
آٹومیشن کا سامان: یہ سٹیپر موٹرز مختلف قسم کے آٹومیشن آلات میں استعمال کی جا سکتی ہیں، جیسے خودکار پروڈکشن لائنز، پیکیجنگ مشینری، اور خودکار اسٹوریج سسٹم۔ وہ اعلی صحت سے متعلق پوزیشننگ اور موشن کنٹرول کو فعال کرتے ہیں، درست آپریشن اور آلات کی اعلی کارکردگی کو یقینی بناتے ہیں۔
روبوٹکس: 28 ملی میٹر ہائبرڈ بال اسکرو سٹیپر موٹرز کی کمپیکٹ طول و عرض اور اعلیٰ درست پوزیشننگ انہیں روبوٹکس میں عام طور پر استعمال ہونے والی ڈرائیو بناتی ہے۔ ان کا استعمال مختلف قسم کے روبوٹک ایپلی کیشنز بشمول صنعتی روبوٹس، سروس روبوٹس، میڈیکل روبوٹس اور بہت کچھ کے لیے روبوٹ کے جوڑوں کی نقل و حرکت کو درست طریقے سے پوزیشن میں رکھنے اور مربوط کرنے کے لیے استعمال کیا جا سکتا ہے۔
الیکٹرانکس: یہ سٹیپر موٹرز مختلف قسم کے الیکٹرانک آلات میں استعمال ہوتی ہیں، جیسے آپٹیکل آلات، درستگی کے آلات، 3D پرنٹرز وغیرہ۔ وہ الیکٹرانک آلات کی ایپلی کیشنز کے لیے انتہائی درست اور قابل اعتماد موشن کنٹرول فراہم کرتے ہیں جن کے لیے درست پوزیشننگ اور عمدہ حرکت کی ضرورت ہوتی ہے۔
طبی آلات: 28 ملی میٹر ہائبرڈ بال سکرو سٹیپر موٹرز طبی آلات کی ایک وسیع رینج میں استعمال ہوتی ہیں، جیسے سرجیکل روبوٹس، طبی سکیننگ کا سامان، منشیات کی ترسیل کے نظام وغیرہ۔ وہ طبی آلات کی اعلیٰ درستگی اور وشوسنییتا کی ضروریات کو پورا کرنے کے لیے درست پوزیشن کنٹرول اور مستحکم حرکت فراہم کرتے ہیں۔
آٹوموٹیو: یہ سٹیپر موٹرز آٹوموٹیو انڈسٹری میں مختلف ایپلی کیشنز میں استعمال ہوتی ہیں، جیسے آٹوموٹیو سیٹ ایڈجسٹمنٹ، سن روف کنٹرول، آٹوموٹیو ڈور لاکنگ میکانزم وغیرہ۔ یہ درست پوزیشن کنٹرول اور مستحکم حرکت فراہم کرتی ہیں۔ وہ درست پوزیشن کنٹرول اور قابل اعتماد پاور آؤٹ پٹ فراہم کرتے ہیں، اور اعلی درستگی اور وشوسنییتا کے لیے آٹوموٹو انڈسٹری کی ضروریات کے لیے موزوں ہیں۔
ایرو اسپیس: 28 ملی میٹر ہائبرڈ بال سکرو سٹیپر موٹرز بھی ایرو اسپیس ایپلی کیشنز میں استعمال ہوتی ہیں۔ انہیں ایرو اسپیس آلات میں پوزیشننگ اور موشن کنٹرول کے لیے استعمال کیا جا سکتا ہے، جیسے سیٹلائٹ اورینٹیشن سسٹم، ہوائی جہاز میں اندرونی میکانزم وغیرہ۔
فائدہ
کومپیکٹ سائز: ان موٹروں کا 28mm فارم فیکٹر ایک کمپیکٹ اور جگہ بچانے والے ڈیزائن کی اجازت دیتا ہے۔ وہ ان ایپلی کیشنز کے لیے موزوں ہیں جہاں سائز کی رکاوٹوں پر غور کیا جاتا ہے۔
بہتر پوزیشننگ کی درستگی: ہائبرڈ سٹیپر موٹر ٹیکنالوجی کا امتزاج اور بال سکرو میکانزم کی درستگی پوزیشننگ کی درستگی کو بہتر بناتی ہے۔ یہ خاص طور پر ان ایپلی کیشنز کے لیے فائدہ مند ہے جن کے لیے عین اور دوبارہ قابل موشن کنٹرول کی ضرورت ہوتی ہے۔
ہموار اور پرسکون آپریشن: ہائبرڈ بال سکرو سٹیپر موٹرز بال سکرو کی کم رگڑ خصوصیات کی وجہ سے ہموار اور پرسکون آپریشن پیش کرتی ہیں۔ یہ ان ایپلی کیشنز کے لیے موزوں بناتا ہے جہاں شور کو کم کرنا مطلوب ہو یا جہاں ہموار حرکت ضروری ہو، جیسے سائنسی آلات یا کیمرہ پوزیشننگ سسٹم میں۔
ہائی ٹارک ٹو سائز ریشو: اپنے کمپیکٹ سائز کے باوجود، 28 ملی میٹر ہائبرڈ بال سکرو سٹیپر موٹرز نمایاں ٹارک فراہم کر سکتی ہیں۔ ٹارک ٹو سائز کا یہ اعلی تناسب انہیں ان ایپلی کیشنز کے لیے موزوں بناتا ہے جن میں بوجھ کو مؤثر طریقے سے چلانے کے لیے کمپیکٹ پن اور کافی ٹارک دونوں کی ضرورت ہوتی ہے۔
توانائی کی کارکردگی: ان موٹروں میں بال سکرو میکانزم موثر پاور ٹرانسمیشن فراہم کرتا ہے، جس کے نتیجے میں توانائی کی کھپت کم ہوتی ہے۔ یہ انہیں توانائی کے قابل بناتا ہے اور آپریشن کے دوران گرمی کی پیداوار کو کم سے کم کرنے میں مدد کرتا ہے۔
بیک لیش میں کمی: گیند سکرو میکانزم بیکلاش کو کم یا ختم کرتا ہے، جو کہ سکرو اور نٹ کے درمیان کھیل یا کلیئرنس ہے۔ اس کے نتیجے میں پوزیشننگ کی درستگی اور دہرانے کی صلاحیت میں بہتری آتی ہے، جس سے یہ موٹریں ایسی ایپلی کیشنز کے لیے موزوں ہوتی ہیں جو عین موشن کنٹرول کا مطالبہ کرتی ہیں۔
لمبی سروس لائف: ایک مضبوط ہائبرڈ سٹیپر موٹر ڈیزائن کا امتزاج اور بال سکرو میکانزم کی پائیداری طویل سروس کی زندگی میں حصہ ڈالتی ہے۔ یہ ایک طویل مدت میں قابل اعتماد اور مستقل کارکردگی کو یقینی بناتا ہے۔
حسب ضرورت کی وسیع رینج: 28 ملی میٹر ہائبرڈ بال سکرو سٹیپر موٹرز مختلف حسب ضرورت آپشنز کے ساتھ دستیاب ہیں جیسے مختلف سٹیپ اینگلز، وائنڈنگ آپشنز، اور شافٹ کنفیگریشنز۔ یہ مخصوص درخواست کی ضروریات کو پورا کرنے میں لچک پیدا کرنے کی اجازت دیتا ہے۔
موٹر انتخاب کے تقاضے:
► نقل و حرکت/ بڑھتے ہوئے سمت
►لوڈ کی ضروریات
►سٹروک کے تقاضے
►مشیننگ کی ضروریات کو ختم کریں۔
► صحت سے متعلق تقاضے
► انکوڈر فیڈ بیک کے تقاضے
► دستی ایڈجسٹمنٹ کے تقاضے
►ماحولیاتی تقاضے
پیداواری ورکشاپ






